mlpy.learners.offline.irl.ApprenticeshipLearner¶
-
class
mlpy.learners.offline.irl.ApprenticeshipLearner(obs, planner, method=None, max_iter=None, thresh=None, gamma=None, nsamples=None, max_steps=None, filename=None, **kwargs)[source]¶ Bases:
mlpy.learners.offline.IOfflineLearnerThe apprenticeship learner.
The apprenticeship learner is an inverse reinforcement learner, a method introduced by Abbeel and Ng [R2] which strives to imitate the demonstrations given by an expert.
Parameters: obs : array_like, shape (n, nfeatures, ni)
List of trajectories provided by demonstrator, which the learner is trying to emulate, where n is the number of sequences, ni is the length of the i_th demonstration, and each demonstration has nfeatures features.
planner : IPlanner
The planner to use to determine the best action.
method : {‘projection’, ‘maxmargin’}, optional
The IRL method to employ. Default is projection.
max_iter : int, optional
The maximum number of iteration after which learning will be terminated. It is assumed that a policy close enough to the experts demonstrations was found. Default is inf.
thresh : float, optional
The learning is considered having converged to the demonstrations once the threshold has been reach. Default is eps.
gamma : float, optional
The discount factor. Default is 0.9.
nsamples : int, optional
The number of samples taken during Monte Carlo sampling. Default is 100.
max_steps : int, optional
The maximum number of steps in an iteration (during MonteCarlo sampling). Default is 100.
filename : str, optional
The name of the file to save the learner state to after each iteration. If None is given, the learner state is not saved. Default is None.
Other Parameters: mix_policies : bool
Whether to create a new policy by mixing from policies seen so far or by considering the best valued action. Default is False.
rescale : bool
If set to True, the feature expectations are rescaled to be between 0 and 1. Default is False.
visualize : bool
Visualize each iteration of the IRL step if set to True. Default is False.
See also
Notes
Method maxmargin using a QP solver to solve the following equation:
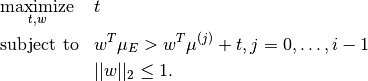
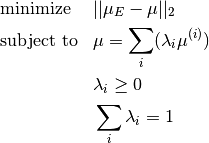
and mixing policies is realized by solving the quadratic problem:
The QP solver used for the implementation is the IBM ILOG CPLEX Optimizer which requires a separate license. If you are unable to obtain a license, the ‘projection’ method can be used instead.
References
[R2] (1, 2) Abbeel, Pieter, and Andrew Y. Ng. “Apprenticeship learning via inverse reinforcement learning.” Proceedings of the twenty-first international conference on Machine learning. ACM, 2004. Attributes
midThe module’s unique identifier. typeThis learner is of type offline. Methods
choose_action(state)Choose the next action execute(experience)Execute learning specific updates. learn()Learn the optimal policy via apprenticeship learning. load(filename)Load the state of the module from file. reset(t, **kwargs)Reset reinforcement learner. save(filename)Save the current state of the module to file.